Research Theme
Research Interests
My research interests center on the design and control of robotic systems for micro-manipulation and minimally invasive surgical applications. In terms of mechanical design, I focus on ultra-precise actuation and transmission mechanisms based on piezoelectric ceramics and compliant mechanisms. By leveraging principles such as direct-drive, stick-slip, and inchworm actuation, I aim to develop cross-scale actuators that simultaneously offer high resolution and large travel range. For end-effectors, I explore the use of mechanical metamaterials to realize multi-level constant-force outputs and programmable mechanical behaviors.
Furthermore, I am actively extending compliant mechanism design principles to minimally invasive surgical robots, with a particular emphasis on the structural optimization of continuum robots. The goal is to enhance their leader-follower motion characteristics, length-to-diameter ratio, and payload capacity to meet the dual demands of flexibility and controllability in surgical scenarios.
On the control side, my work encompasses precision motion control techniques including iterative learning control, repetitive control, sliding mode control, adaptive control, and compliant force control, aimed at achieving high accuracy and robustness under dynamic operating conditions. Future research will further integrate machine learning and data-driven modeling approaches to enable intelligent control and autonomous decision-making for complex tasks.
Compliant Mechanism
Compliant mechanism (CM) is the primary choice in precision positioning stages as the motion transmission module owing to their distinctive characteristics. CMs can be easily fabricated due to their monolithic and miniaturized structure, with no need for assembly or lubrication, and introduce no wear, backlash, or interstices. However, the variety of configurations for compliant linear guiding mechanisms is still insufficient, and there are common issues of inadequate guiding performance, limited motion range, or small bandwidth. A novel F-shaped compliant straight-line mechanism with a simple and compact structure is devised and utilized. Output stiffness, input stiffness, and amplification ratio of the guided stage are obtained through static modeling established by the compliance matrix method. First-order natural frequency is calculated via dynamic modeling derived from Lagrange’s equation.
Stick-Slip Piezoelectric Actuator
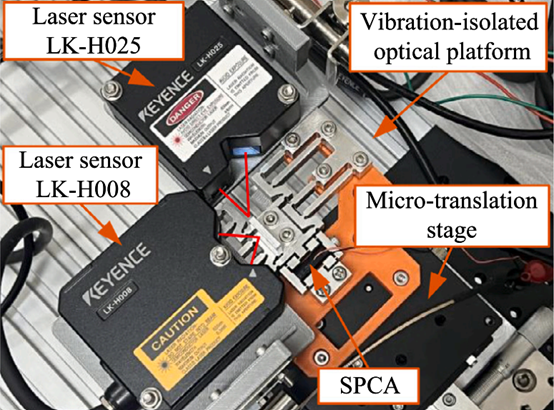
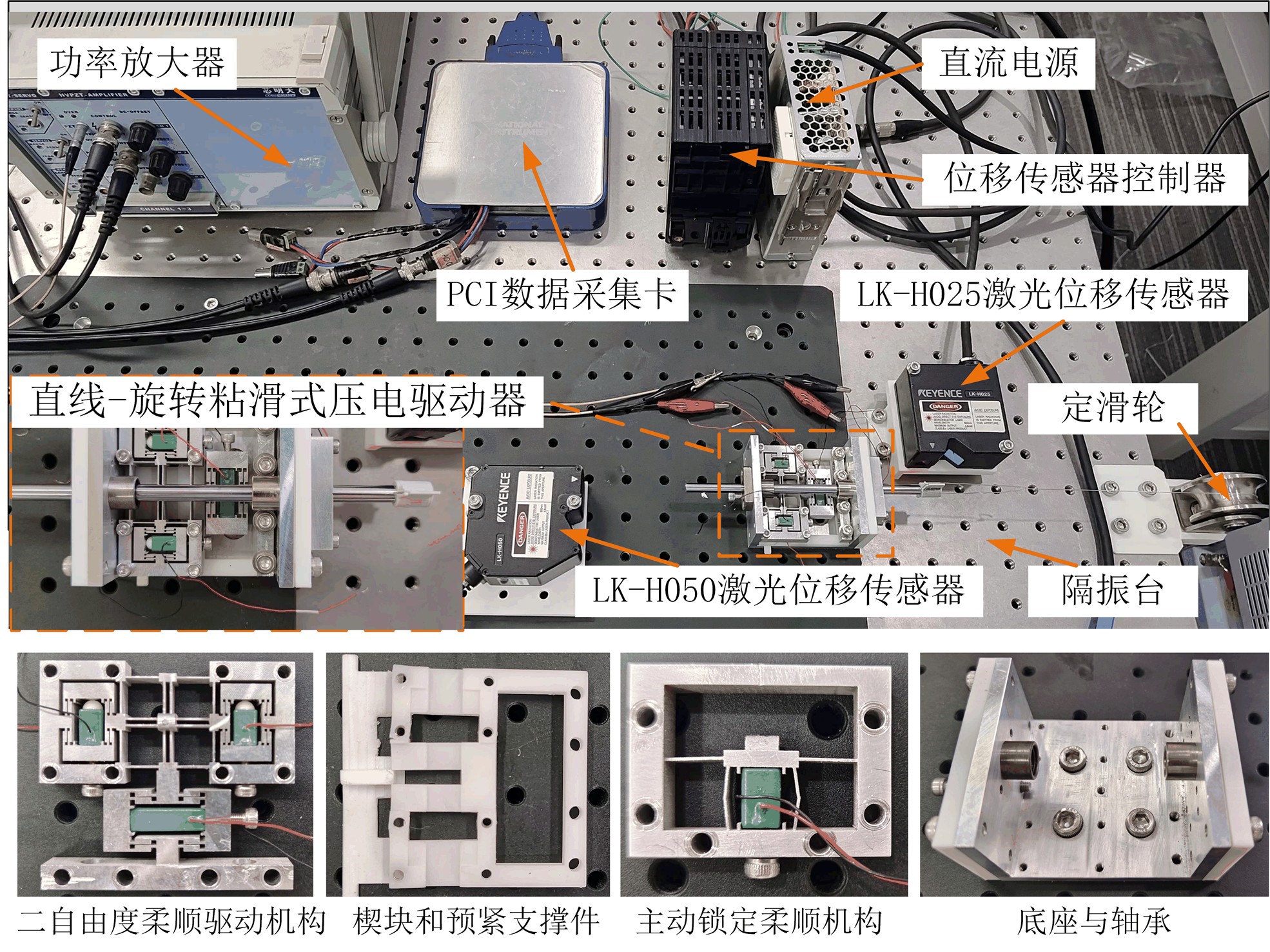 Stick-slip piezoelectric actuators exhibit the advantages of simple structure, compact size, high resolution, and fast motion speed, enabling millimeter-scale motion range with nanometer-level positioning accuracy. Owing to these unique features, they hold strong potential for high-precision positioning in advanced microsystems, biomedical engineering, optical instrumentation, and other emerging technologies. However, current high-speed stick-slip piezoelectric actuators suffer from the problems of unstable motion, actuator damage, and contact wear due to the high-frequency driving. Combining the parallelogram with the triangular mechanism, a two-stage compliant amplification mechanism is integrated into the stick-slip piezoelectric actuator to achieve low-frequency driving and high-speed motion simultaneously. In addition, a novel linear-rotary stick-slip piezoelectric actuator, aiming to replace manual operations and enhance the precision, repeatability, and stability of targeted puncture, providing theoretical and technical support for the clinical application of robot-assisted targeted puncture is also designed.
Stick-slip piezoelectric actuators exhibit the advantages of simple structure, compact size, high resolution, and fast motion speed, enabling millimeter-scale motion range with nanometer-level positioning accuracy. Owing to these unique features, they hold strong potential for high-precision positioning in advanced microsystems, biomedical engineering, optical instrumentation, and other emerging technologies. However, current high-speed stick-slip piezoelectric actuators suffer from the problems of unstable motion, actuator damage, and contact wear due to the high-frequency driving. Combining the parallelogram with the triangular mechanism, a two-stage compliant amplification mechanism is integrated into the stick-slip piezoelectric actuator to achieve low-frequency driving and high-speed motion simultaneously. In addition, a novel linear-rotary stick-slip piezoelectric actuator, aiming to replace manual operations and enhance the precision, repeatability, and stability of targeted puncture, providing theoretical and technical support for the clinical application of robot-assisted targeted puncture is also designed.
Mechanical Metamaterial based Mechanism Synthesis
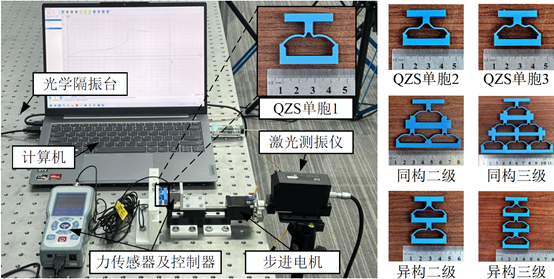
With the growing demand for heterogeneous and diverse micro-electro-mechanical system (MEMS) assembly, the development of automated assembly technology has raised higher requirements for the reliable gripping of small and fragile devices. As the end-effector of an automated assembly system, a gripper faces challenges such as high adaptability requirements to multi-scale parts, strict gripping force requirements, and complex control strategy. A multi-stage constant-force compliant gripper based on quasi-zero-stiffness (QZS) unit cells is proposed. Research is carried out step by step around the design and validation of the QZS unit cells, multi-stage constant-force modules, and the compliant gripper system, aiming to achieve multi-stage constant-force output without complicated control algorithms and to improve adaptability and reliability in automated gripping applications.
High Precision Motion Control
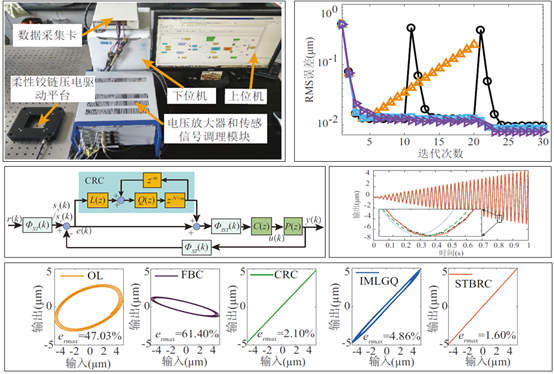
The piezoelectric nanopositioning stage is a crucial scanning device aimed at operating with nanometer or subnanometer precision. It has the advantages of high stiffness and fast response through employing piezoelectric actuators and flexure-hinge-guided mechanisms. The combination of feedback and feedforward controllers is a promising control scheme, where the feedback controller is designed to retain stability and attenuate unknown disturbances and noise, and the feedforward controller can compensate the tracking errors and known disturbances. Aiming to the repetitive reference signals, iterative learning control (ILC) and repetitive control (RC) are developed to achieve the high precision through learning the previous iterations or cycles. To eliminate dependence on the model and signals, several date-driven methods and control mechanisms are also developed.
Position/Force Control for Surgical Device
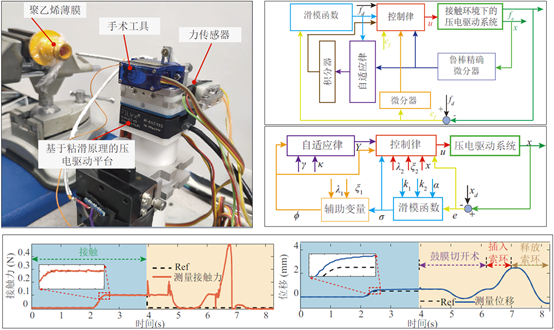
The required suitably soft-contact interaction in certain surgical device applications brings great challenges on the force and position control because the soft-contact environment is nonlinear, viscoelastic, and inhomogeneous. Precise tracking of the interaction force between the surgical device and affected human tissues is an important aspect to improve the safety and surgery success rate. An adaptive integral terminal sliding mode-based impedance control and adaptive integral terminal sliding mode force control scheme are formulated to simultaneously regulate and control the position and force for a piezoactuated ear surgical device with soft interaction. The proposed method is applied on the test surgical device and the test surgical operation on the mock membrane can be completed successfully, which shows the feasibility of the proposed method in practical application.
Continuum Robots
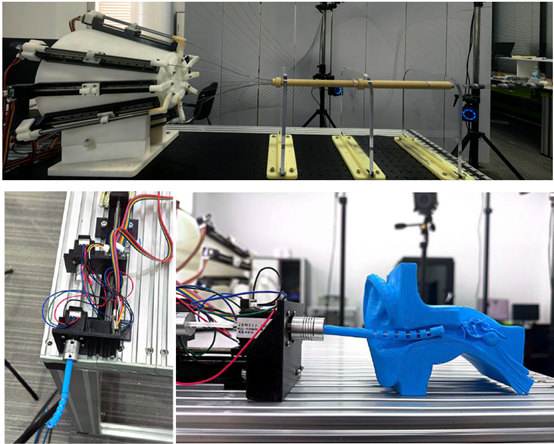
Continuum robots represent a fundamental departure from traditional rigid-link robotic architectures. Inspired by biological organisms, these robots replace conventional joint-link mechanisms with inherently compliant and organic structures. Their morphology is reminiscent of natural forms such as elephant trunks, octopus arms, tongues, worms, jellyfish, and snakes. Constructed from flexible, elastic, or soft materials, continuum robots are capable of producing complex, continuous bending motions and assuming highly curvilinear shapes. This unique structural flexibility enables them to navigate constrained environments and interact safely with delicate objects or tissues. Now, we have developed two prototypes: continuum robot with Follow-the-Leader (FTL) motion and concentric push–pull continuum robot. The further work will focus on the structural optimization of the mechanism and safe control for minimally invasive surgery.